
ROBOT ED 209
ArtMovieFan :: CREATION :: COSPLAY
Page 2 sur 11 •  1, 2, 3, ... 9, 10, 11
1, 2, 3, ... 9, 10, 11


philigore- Admin forum

- Nombre de messages : 2807
Age : 54
Localisation * : l'Aube
Emploi : Sculpteur Numérique
Date d'inscription : 14/09/2007 -

Re: ROBOT ED 209
par DV Ven 10 Oct 2014 - 18:22
- Les angles sont légèrement arrondis mais avec un peu de Sintofer à l'intérieur de l'angle, un léger limage sur l'arête et un petit coup de peinture, ça peut se résoudre facilement.
- Par contre il faudrait que tu trouves des vis à la tête plus plate ( ou les limer au maximum ) car elles sont trop saillantes et sur l'original elles sont embouties.

http://robocoparchive.com/info/making1-ed209.htm
Dernière édition par DV le Ven 10 Oct 2014 - 23:58, édité 1 fois
DV- Membre Actif

- Nombre de messages : 1800
Age : 56
Localisation * : Tatooine
Date d'inscription : 08/01/2011
Re: ROBOT ED 209
par NAINJAUNE Ven 10 Oct 2014 - 22:50
Les incohérences de l'original ne seront peut être pas reproduit.
Les deux vis sur l'orteil ne servent certainement pas à tenir la partie plus sombre, puisque cette partie s'efface vers le bas quand le robot marche.
Si tu remarques bien, l’original n'a qu'un doigt à chaque pied, et les pattes son tenu par un vulgaire bout de bois, personnellement je ne pousserais pas les détails aussi loin
Quand à la découpe des doigts, les photos trouvés sur internet comportent toutes ce détail. Et en particulier le film original.
Ce qui veut dire que la photo que tu as mise correspond à un ED 209 qui n'est pas 100% détaillé, pour une scène ou on lui voit les pieds.
Regarde à la 25 ème seconde, et à la 45 ème.
http://www.frequency.com/video/robocop-08-boardroom-storyboard-with/90152271/-/5-129010
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par DV Ven 10 Oct 2014 - 23:22
Demeure le problème des vis embouties qui sont selon moi un élément important du design de la bête pas facile à résoudre.
Ton travail est toutefois superbe mais parvenir à faire un modèle 100/100 accurate tout en métal et articulé serait une gageure fantastique surtout à cette taille.
Merci pour ces précisions.
DV- Membre Actif
- Nombre de messages : 1800
Age : 56
Localisation * : Tatooine
Date d'inscription : 08/01/2011
Re: ROBOT ED 209
par petersteven-fondateur Sam 11 Oct 2014 - 9:05

_________________


petersteven-fondateur- Admin
- Nombre de messages : 2536
Age : 46
Localisation * : Rhône
Date d'inscription : 06/03/2006
Re: ROBOT ED 209
par Ripley Sam 11 Oct 2014 - 10:05
Ripley- Membre Actif
- Nombre de messages : 1064
Age : 49
Localisation * : Franche Comté
Date d'inscription : 28/06/2008
Re: ROBOT ED 209
par JIPI Sam 11 Oct 2014 - 11:42


JIPI- Membre Actif
- Nombre de messages : 666
Age : 53
Localisation * : LA LANDE DE FRONSAC
Emploi : Sérigraphe
Date d'inscription : 04/01/2007 -
Re: ROBOT ED 209
par NAINJAUNE Sam 11 Oct 2014 - 18:43
Deux feuilles d'alu 2 m/m colée entre elles avec un scotch double face, il est plus rapide de travailler deux pièces en même temps. Sauf pour des épaisseurs supérieures à 3m/m
Perçage
Découpe

Un petit coup de lime

Découpe avec la scie sur table et ponçage ( pour la photo)

Puisque la perceuse et la scie sont réglés et que le montage me convient autant en profiter pour tout découper

Le montage des glissières, afin d'être fidèle au modèle,
il faut un "U" en alu,
un autre "U" plus petit dans lequel va passer une tige fileté de 6 m/m qui servira à l'assemblage
un plat d'alu 2 m/m
et par dessus la pièce découpée précédemment
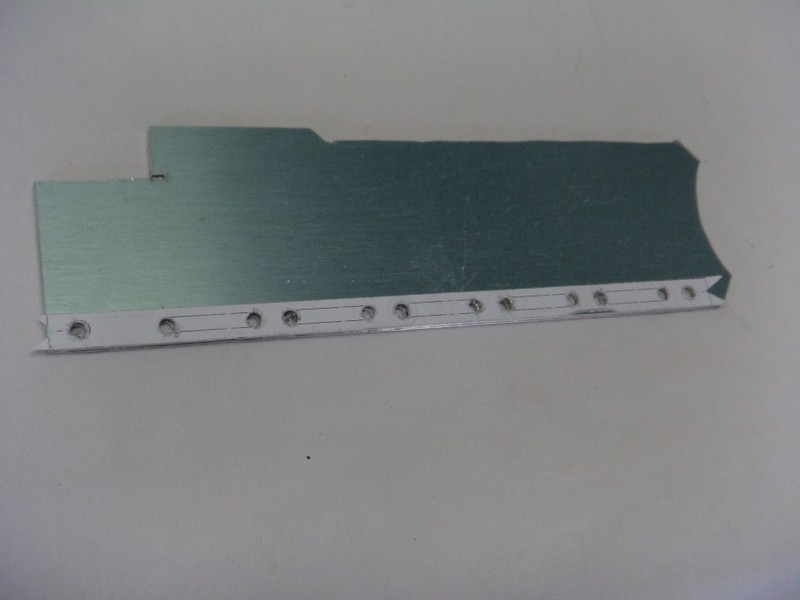
Le support une feuille d'alu, une feuille d'alucobond collé sur l'alu, le patron en papier est collé pour faire la découpe en fente, celle ci à été percée, découpé à la scie et amélioré sans papier verre mais avec une toupie.


De chaque coté les U précédents sont eux aussi collés, on a ainsi une glissière complète, il faut en réaliser quatre.

Détail

Assemblage avec les tiges filetées
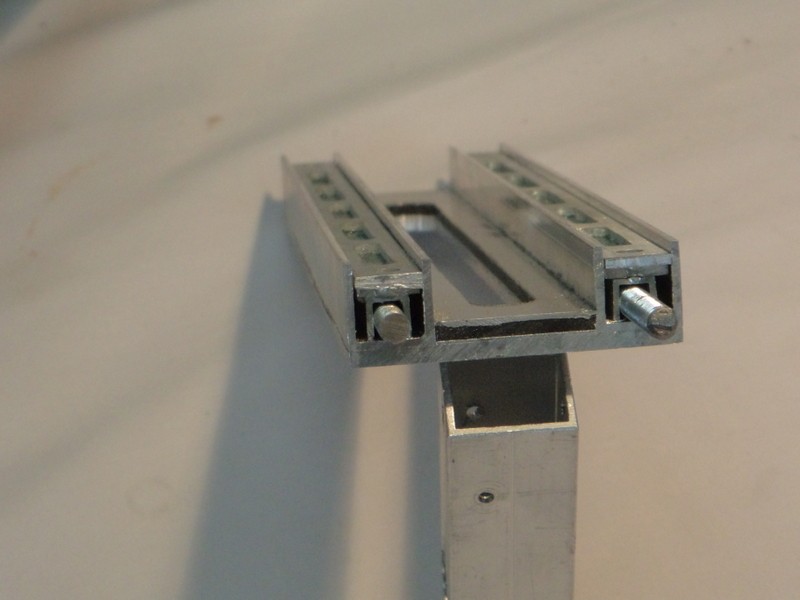
A chaque bout une platine alu 6 m/m découpé au bon profil.

NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012

pili-- Membre Actif
- Nombre de messages : 1631
Age : 53
Localisation * : 91
Date d'inscription : 16/06/2013
Re: ROBOT ED 209
par NAINJAUNE Lun 13 Oct 2014 - 22:37
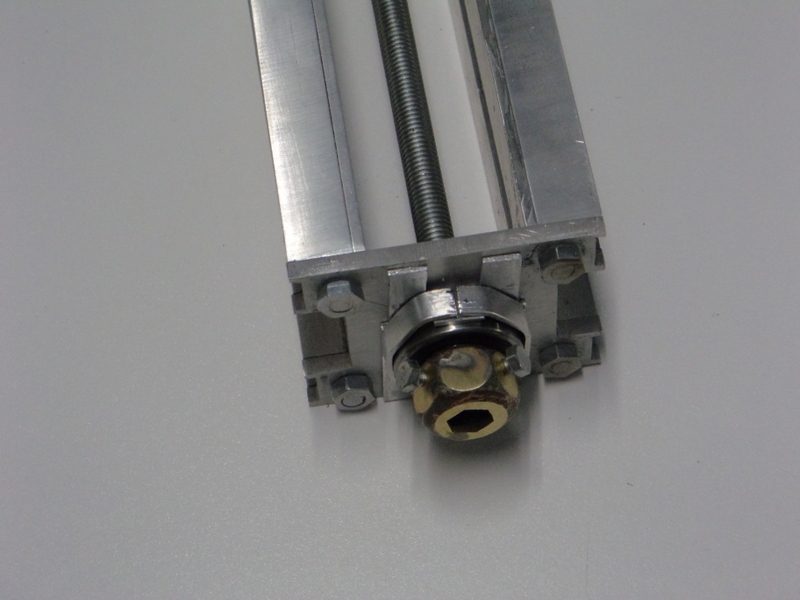
On retourne dans la plomberie,
la tige fileté qui traverse le tibia et qui atterrie au dessus de l'articulation de la cheville sera prise entre deux roulements à billes (rotation plus facile en cas de motorisation).
partie supérieure
raccord de plomberie et roulement à billes récupérés

démontage

l'assemblage sera fait comme ceci


brasage de l'ensemble

perçage et filetage de trois trous pour trois vis qui bloqueront la tige fileté, et restera démontable.

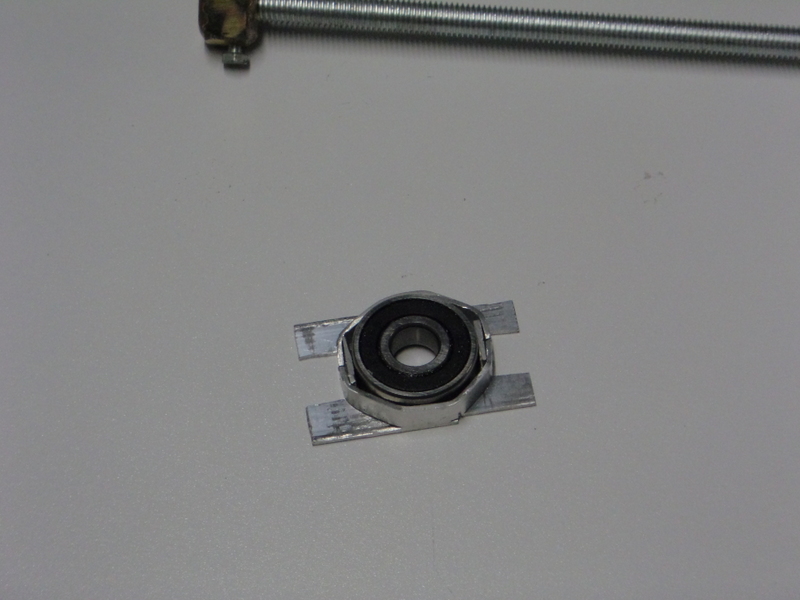
Le roulement à billes sera coincé dans une "cage" fabriquée avec un demi tube alu, les qutres pattes qui dépassent sont prévue pour le fixer.

Le roulement à billes en place
L'ensemble monté sur le haut du tibia.
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par DV Mar 14 Oct 2014 - 0:11
NAINJAUNE a écrit:Tout à fait en haut du tibia, un capot avec à l'intérieur un système de commande de la vis sans fin qui fait remonter ou descendre le genou sur le tibia, ce mécanisme doit servir en cas de panne moteur????. En réalité la montée et la descente n'étant pas commandés par moteur, pas de réseau électrique visible, elles sont certainement actionnées depuis le haut au moyen d'une visseuse.
Tout à fait et pour preuve on voit un disque circulaire avec trois écrous tourner au dessus du "tibias 2" ( sur ton dessin ) pendant que la vis sans fin qui fait remonter ou descendre le genou sur le tibia, c'est incroyable comme ce ED 209 à été foutrement bien conçu.
Ton hypothétique motorisation me laisse rêveur, tu fait fort...
DV- Membre Actif
- Nombre de messages : 1800
Age : 56
Localisation * : Tatooine
Date d'inscription : 08/01/2011
Re: ROBOT ED 209
par NAINJAUNE Mar 14 Oct 2014 - 21:29
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par pili- Mer 15 Oct 2014 - 7:46
pili-- Membre Actif
- Nombre de messages : 1631
Age : 53
Localisation * : 91
Date d'inscription : 16/06/2013
Re: ROBOT ED 209
par DV Mer 15 Oct 2014 - 11:52
L'armature du modèle réduit en stop motion si ça peut t'aider :

Et le lien du gars qui est en train de la refaire en aluminium:
http://www.therpf.com/f10/build-log-ed-209-stop-motion-armature-202268/

Puis des images du Modèle réduit en stop motion sous d'autres angles du vue :
http://www.robocoparchive.com/char/ed.htm


DV- Membre Actif
- Nombre de messages : 1800
Age : 56
Localisation * : Tatooine
Date d'inscription : 08/01/2011
Re: ROBOT ED 209
par NAINJAUNE Mer 15 Oct 2014 - 22:25
Le gars qui en fabrique un à l'air de s'être arrête, il n'a plus posté depuis qu'il a eu son imprimante 3D au mois de juin
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par DV Jeu 16 Oct 2014 - 13:53
NAINJAUNE a écrit:Merci DV j’avais déjà tout ça.
Le gars qui en fabrique un à l'air de s'être arrête, il n'a plus posté depuis qu'il a eu son imprimante 3D au mois de juin
Ouaip j'ai vu ça et c'est bien dommage vu le travail accompli...
Sinon pour les photos peux tu orienter les recherches, quelles parties te posent problème ?
DV- Membre Actif
- Nombre de messages : 1800
Age : 56
Localisation * : Tatooine
Date d'inscription : 08/01/2011
Re: ROBOT ED 209
par NAINJAUNE Jeu 16 Oct 2014 - 17:37
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012

Fetchou- Admin forum
- Nombre de messages : 5354
Age : 62
Localisation * : AUTERIVE:-31-
Emploi : travailleur indépendant
Date d'inscription : 30/10/2006 -
Re: ROBOT ED 209
par NAINJAUNE Jeu 16 Oct 2014 - 21:10
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par NAINJAUNE Jeu 16 Oct 2014 - 22:35
Après découpe et pliage


Les rondelles sur la partie supérieure sont fabriquées à la demande.

Les autres pièces

L'ensemble est collé.

A l'autre bout un écrou et un roulement à bille ont été disposés, l'écrou et la tige fileté sont bloqués par deux vis, pour permettre le démontage.

NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par Fetchou Jeu 16 Oct 2014 - 23:45




dis moi si tu veut un détail en particulier
_________________

Fetchou- Admin forum
- Nombre de messages : 5354
Age : 62
Localisation * : AUTERIVE:-31-
Emploi : travailleur indépendant
Date d'inscription : 30/10/2006 -
Re: ROBOT ED 209
par NAINJAUNE Sam 18 Oct 2014 - 15:06
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Re: ROBOT ED 209
par NAINJAUNE Sam 18 Oct 2014 - 15:16
La rotation au niveau du genou, le pied tourne de droite à gauche
Un tube fileté en laiton ( accessoire de plomberie) ; je dis tube car il faut que la tige fileté diamètre 10 m/m passe librement; deux écrous un tube cuivre pour guider la tige fileté.
Voici tous les éléments
un morceau de tube
un autre morceau coupé en arrondie
deux "U" fabriqués avec du tube recoupé, il serviront à fixer les deux fermetures démontables
deux fermetures avec trous oblongs
deux feuilles de 3 m/m pour les faces extérieures
la partie arrondie avec sa garniture
la tige fileté avec son articulation ( la plus longue qui sert à monter et descendre)
une autre tige fileté qui sert à l'articulation genou hanche
un tube fileté en laiton avec une bague écrou et un écrou avec un tube cuivre qui sert de guide cette ensemble permet la rotation droite gauche du tibia et du pied sur le genou

Place aux photos du montage







les flasques qui tiennent le genou dans les glissières sont constituées d'alucobond 4 m/m,

Le pliage se fait par découpe partiel: au moyen de la toupie une gorge est faite avec un angle de 90°, l'alucobond est constitué de deux feuilles alu plus une âme en PVC, seule la feuille extérieure reste entière.

Le pliage est hyper facile, la finition impeccable. Dommage que pour les courbes cela ne fonctionne pas avec de petits rayons.

Un autre "U" en alucobond, avec un demi tube découpé serviront à faire l'intérieure.

Le grand "U" en forme de "H" est entouré par un pliage en alu 2 m/m (pliage maison)

et enfin le petit "U" est mis à l'intérieure.

Compliqué mais nécessaire pour ressembler au modèle.
Voici la flasque posé sur la glissière.


Ces flaques sont solidarisés du genou par deux boulons vissés dans deux écrous brasés sur une rallonge fileté diamètre 10 m/m

Chaque articulation peut être durci ou bloqué grâce aux écrous.
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012


Fetchou- Admin forum
- Nombre de messages : 5354
Age : 62
Localisation * : AUTERIVE:-31-
Emploi : travailleur indépendant
Date d'inscription : 30/10/2006 -
Re: ROBOT ED 209
par NAINJAUNE Sam 18 Oct 2014 - 21:12
Dommage certain détails ne correspondront pas, j'ai fait avec ce que j'avais.
Comme quoi ont peut toujours chercher, un autre trouvera toujours autre chose.............
NAINJAUNE- Membre Actif
- Nombre de messages : 1513
Age : 72
Localisation * : 33320 EYSINES
Emploi : retraité
Date d'inscription : 02/08/2012
Page 2 sur 11 • 1, 2, 3, ... 9, 10, 11
ArtMovieFan :: CREATION :: COSPLAY